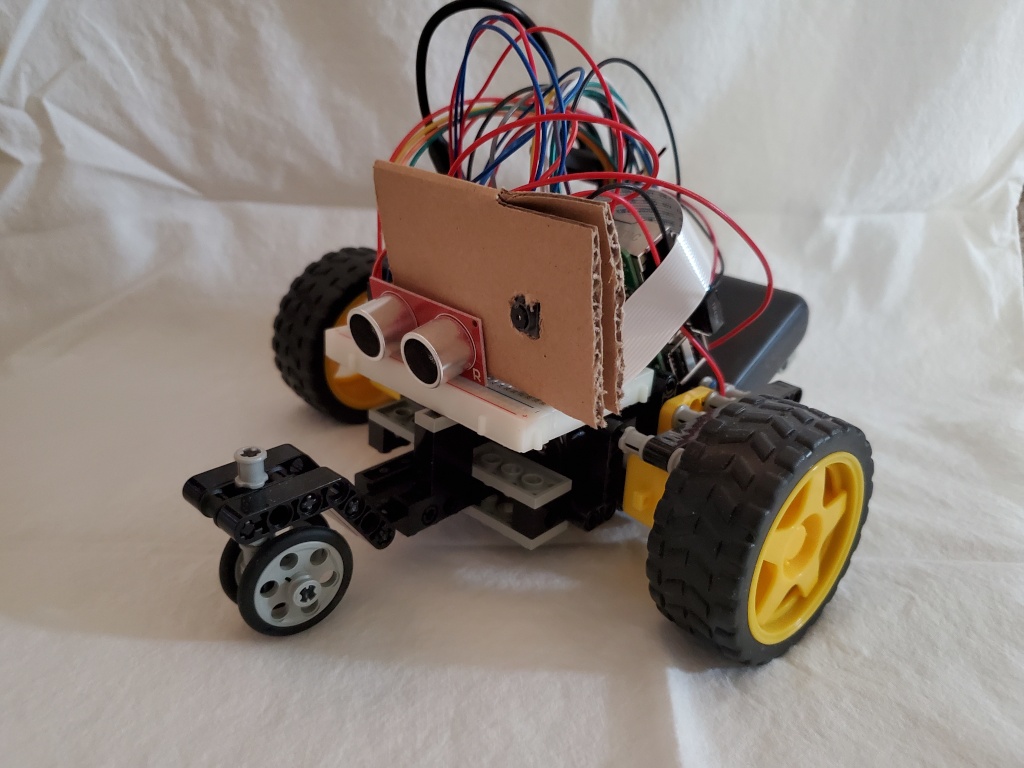
Here’s a two wheeled drone I did as a final project for a Python course I took while pursuing my master’s in chemical engineering.
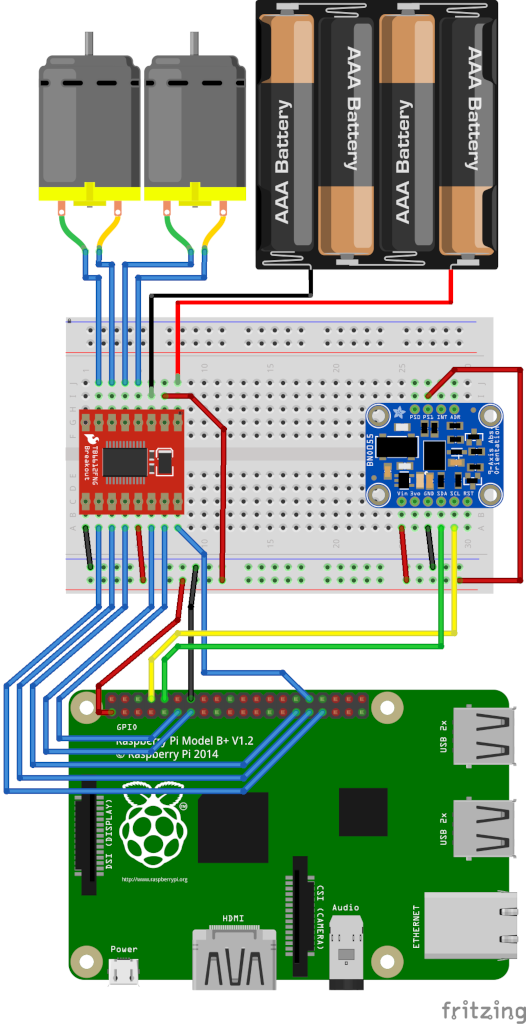
A flask app, running on a Raspberry Pi, displays video from the Raspberry Pi camera module. Sliders on either side of the video feed control the speed of the left and right wheels. Various system statistics are pulled from the Pi and superimposed on the video. The compass heading is calculated from magnetometer data pulled from a BNO055 IMU and overlaid, as well.